A Hybrid Control Approach for the Swing Free Transportation of a Double Pendulum with a Quadrotor
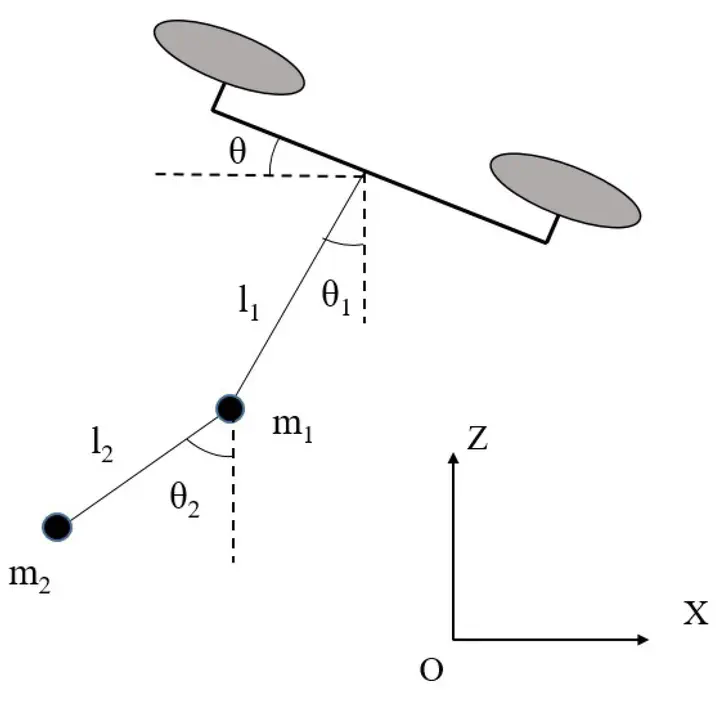 Image credit: [Applied Sciences]
Image credit: [Applied Sciences]Abstract
In this article, a control strategy approach is proposed for a system consisting of a quadrotor transporting a double pendulum. In our case, we attempt to achieve a swing free transportation of the pendulum, while the quadrotor closely follows a specific trajectory. This dynamic system is highly nonlinear, therefore, the fulfillment of this complex task represents a demanding challenge. Moreover, achieving dampening of the double pendulum oscillations while following a precise trajectory are conflicting goals. We apply a proportional derivative (PD) and a model predictive control (MPC) controllers for this task. Transportation of a multiple pendulum with an aerial robot is a step forward in the state of art towards the study of the transportation of loads with complex dynamics. We provide the modeling of the quadrotor and the double pendulum. For MPC we define the cost function that has to be minimized to achieve optimal control. We report encouraging positive results on a simulated environmentcomparing the performance of our MPC-PD control circuit against a PD-PD configuration, achieving a three fold reduction of the double pendulum maximum swinging angle.
Julián Estévez
Artificial Intelligence and Robotics Professor
My research interests include distributed robotics, mobile computing and programmable matter.