Home
Posts
Projects
Talks
Publications
Contact
Light
Dark
Automatic
Control engineering
Reinforcement Learning Based Trajectory Planning for Multi-UAV Load Transportation
This study introduces a novel trajectory planning approach for the transportation of cable-suspended loads employing three quadrotors, relying on a reinforcement learning (RL) algorithm. The primary objective of this path planning method is to transport the cargo smoothly while avoiding its swing.
Julián Estévez
,
JM Lopez-Guede
,
J. del Valle-Echavarri
,
M. Graña
Cite
DOI
Artificial Intelligence Applied to Drone Control: A State of the Art
his study of the state of the art examines the impact of AI on improving drone autonomous behavior, covering from automation to complex real-time decision making.
D. Caballero
,
JM Lopez-Guede
,
Julián Estévez
,
M. Graña
Cite
DOI
Harnessing NOx emission management: A virtual sensor model for natural gas power generation engines with active pre-chamber
This paper presents a NOx Sensor machine learning model for a highly efficient 2MW power generation lean burn gas engine with an active pre-chamber.
J. del Valle-Echavarri
,
JM Lopez-Guede
,
Julián Estévez
Cite
DOI
A low-cost vision system for online reciprocal collision avoidance with UAVs
In this article, we propose a reciprocal collision avoidance system for autonomous drones, based on computer vision and using relative positioning in an indoor environment.
Julián Estévez
,
E. Nuñez
,
G. Garate
,
JM Lopez-Guede
Cite
DOI
Review of Aerial Transportation of Suspended-Cable Payloads with Quadrotors
In this paper, we focus on the current state of the art of aerial transportation systems with suspended loads by a single UAV and a team of them and present a review of different dynamic cable models and control systems.
Julián Estévez
,
G. Garate
,
JM Lopez-Guede
,
M. Larrea
Cite
DOI
Hybrid Modeling of Deformable Linear Objects for Their Cooperative Transportation by Teams of Quadrotors
The paper’s main contribution is the formulation of the hybrid selective model of the DLO sections as either catenaries or parabolas, which allows us to overcome these sagging conditions. We provide the specific decision rule to shift between DLO models. Simulation results demonstrate the performance of the proposed approach under stringent conditions.
Julián Estévez
,
JM Lopez-Guede
,
G. Garate
,
M. Graña
Cite
DOI
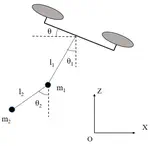
A Hybrid Control Approach for the Swing Free Transportation of a Double Pendulum with a Quadrotor
Lorem ipsum dolor sit amet, consectetur adipiscing elit. Duis posuere tellus ac convallis placerat. Proin tincidunt magna sed ex sollicitudin condimentum.
Julián Estévez
,
JM Lopez-Guede
,
G. Garate
,
M. Graña
Cite
DOI
Active Learning for Road Lane Landmark Inventory with V-ELM in Highly Uncontrolled Image Capture Conditions
Lorem ipsum dolor sit amet, consectetur adipiscing elit. Duis posuere tellus ac convallis placerat. Proin tincidunt magna sed ex sollicitudin condimentum.
JM Lopez-Guede
,
A. Izquierdo
,
M. Graña
,
Julián Estévez
Cite
DOI
Cite
×